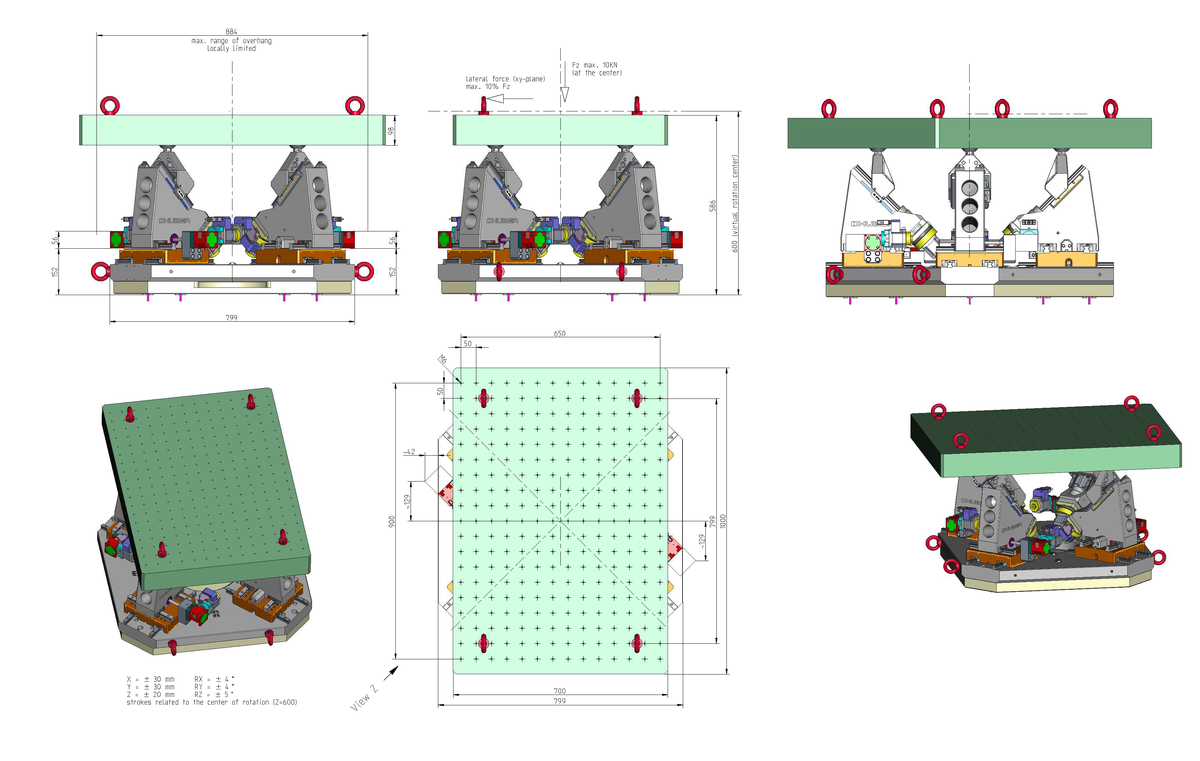
Quadropod Q-600
- problemlose Kombinationsmöglichkeit mit zusätzlichen konventionellen Positioniersystemen
- hohe, anhaltende Systemstabilität durch den Einsatz spannungsarmer, hochbelastbarer Materialien
- ausgestattet mit Präzisionsgewinderollspindeln
- optimale Feinabstimmung aufgrund hoher Reproduzierbarkeit der minimalen Systemschrittweite durch Verwendung reibungsarmer Führungen
- robuste Oberflächen durch eine galvanisch eloxierte Behandlung
- drei Präzisionsklassen zur Auswahl
- Encodersystem: Renishaw Resolute (32-bit)
Dimension
| L | B | H | ||
| 1000mm | 1000mm | 600mm | ||
Spezifikationen (maximale Einzelbewegungen)
| Verfahrbereich [mm] | X | +/-30 | ||
| Y | +/-30 | |||
| Z | +/-30 | |||
| Winkelbereich [°] | Rx | +/-5,6 | ||
| Ry | +/-5 | |||
| Rz | +/-5 |
Maximale Belastungen
| Fmax (vertikal) | Fmax (horizontal) | ||
| 7000N | +/-2000N |
Spezifikationen
| Translatorische Bewegungen | ||||||
| Genauigkeit [µm] | <= | +/- | 10 | 3 | auf Anfrage | |
| WDH unidir. [µm] | <= | 5 | 2 | auf Anfrage | ||
| Auflösung [µm] | <= | 3 | 1 | auf Anfrage | ||
| Ebenheit [µm] | <= | +/- | 3 | 1 | auf Anfrage | |
| Geradheit [µm] | <= | +/- | 3 | 1 | auf Anfrage | |
| Gieren ["] | <= | +/- | 8 | 4 | auf Anfrage | |
| Neigen ["] | <= | +/- | 8 | 4 | auf Anfrage | |
| Rollen ["] | <= | +/- | 8 | 4 | auf Anfrage |
Spezifikationen
| Rotatorische Bewegungen | ||||||
| Genauigkeit [µm] | <= | +/- | 20 | 12 | auf Anfrage | |
| WDH [µm] | <= | 5 | 2 | auf Anfrage | ||
| Auflösung [µm] | <= | 3 | 1 | auf Anfrage | ||
Applikationsspezifische Ausführungen:
- vakuumtauglich
- antimagnetisch
- strahlungsbeständig
- schwarz beschichtet
Steuerung
Die Ansteuerung des Quadropods erfolgt über eine speziell entwickelte Steuerungssoftware in Kombination mit einem 8-Achsen Schrittmotorcontroller.
- Rotationszentrum frei definierbar
- Ansteuerung absoluter Positions- und Winkelwerte
- optional: open oder closed loop Funktionalität
- Schnittstelle für Client Verbindung
- Remotebedienung über spezielles Kommandoprotokoll

Quadropod Q-600